Interval Trees
Motivation
Given a set of intervals (I) on the real line and a query point (q_x), find the intervals that contain (q_x).
Let (I:={[x_1:x_1’],[x_2:x_2’],\ldots,[x_n:x_n’]}). Let (x_{\rm mid}) be the median of the (2n) interval endpoints such that atmost half of them lie on the left and half of them lie on the right.
Definition
- If (I=\phi) then interval tree is a leaf.
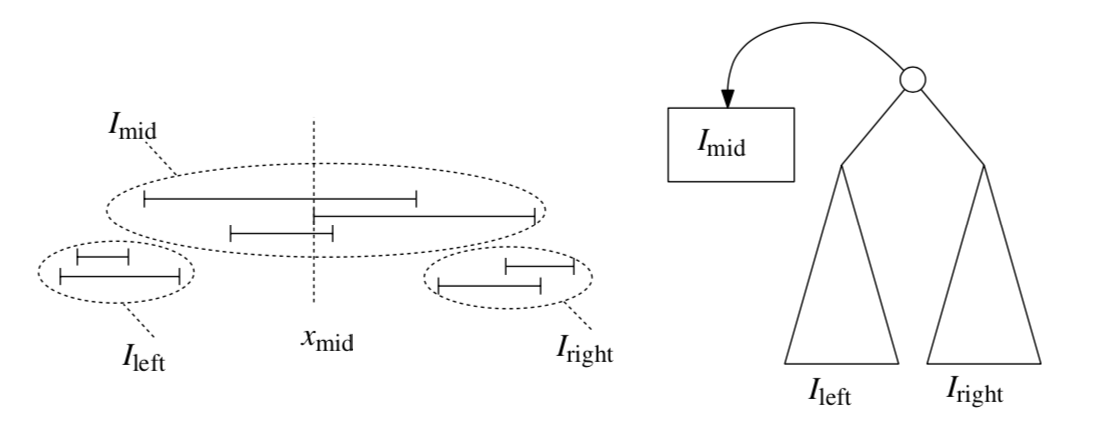
- Otherwise let (x_{\rm mid}) be the median of the endpoints of the interval. Let
- (I_{\rm left}:={[x_j:x_j’]\in I\mid x_j’<x_{\rm mid}})
- (I_{\rm mid}:={[x_j:x_j’]\in I\mid x_j\le x_{\rm mid}\le x_j’}).
- (I_{\rm right}:={[x_j:x_j’]\in I\mid x_j>x_{\rm mid}})
The Interval tree consists of a root node (v) storing (x_{\rm mid}).
-
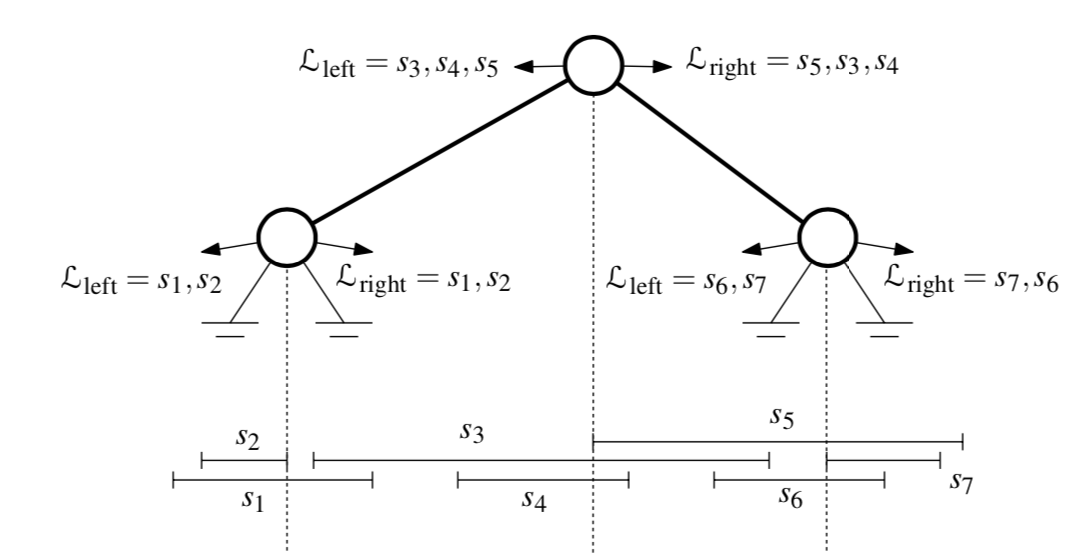
(I_{\rm mid}) is stored twice:
-
({\cal L}_{\rm left}) that is sorted on the left endpoints of (I_{\rm mid})
-
({\cal L}_{\rm right}) that is sorted on the right endpoints of (I_{\rm mid})
-
-
Left subtree of (v) is an interval tree for the set (I_{\rm left}).
-
Right subtree of (v) is an interval tree for the set (I_{\rm right}).
Creation (O(n\log n))
create(I)
if I = null
return empty leaf
else
create a node v
computer x_mid (linear time, constant if presorted)
store x_mid with v
compute I_mid, L_left, L_right
left_child(v) <- create(I_left)
right_child(v) <- create(I_right)
return v
Querying (O(\log n+k))
- If (q_x < x_{\rm mid}(v)) walk along (\cal L_{\rm left}) reporting all intervals that contain (q_x). Stop as soon as an interval doesn’t contain (q_x). Query left subtree of (v).
- Symmetrically do for (q_x>x_{\rm mid(v)})
(k) = Number of reported intervals.
2-D Range Tree
The data structure to store a a horizontal line segments is (\rm T). If we want to create a 2-D range tree then instead of (\cal L_{\rm left}(v)) and (\cal L_{\rm right}(v)) we will store:
- A range tree (T_{\rm left}(v)) on left endpoint segments in (I_{\rm mid}(v)).
- A range tree (T_{\rm right}(v)) on right endpoint segments in (I_{\rm mid}(v))
At time of querying instead of walking along (\cal L_{\rm left}(v)) and (\cal L_{\rm right}(v)) we will perform a query in the range trees (\rm T_{left}(v)) and (\rm T_{right}(v)).
- Creation: (O(n\log n))
- Querying: (O(\log^2n+k))